

小型化がますます重要になる現在、マイクロロボットの製造と組み立ては非常に広く注目されている。 しかし、ミクロの世界では、ほとんどの組立技術はマイクロモジュール(微小モジュール)を単純に並べることしかできず、全体を強固に組み立てることは困難である。
最近では、BMF社の精密3Dプリンティング技術を使って50μm以下の微細な部品を作り、特殊な方法で面白いロボットに組み上げる研究者も出てきている。 本研究は、ACS Applied Materials & Interfaces誌に「Integrated Assembly and Flexible Movement of Microparts Using Multifunctional Bubble Microrobots」というタイトルで発表された。
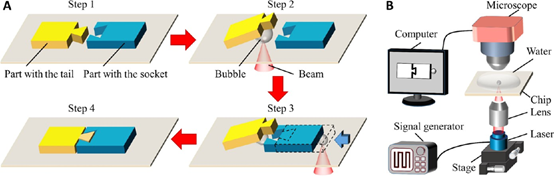
ロボットの組み立ての手順は、以下の4つステップにまとめて提案した。
- マイクロモジュールを近接配置させる。
- 特殊なバブル(気泡)を使い、片方のモジュールを持ち上げる。
- 別のバブル(気泡)で、もう一方のモジュールを持ち上げているモジュールに向かって押す。
- バブル(気泡)を取り除くことで、持ち上げられたモジュールがゆっくりと下がり、2つのモジュールが組み合わされる。
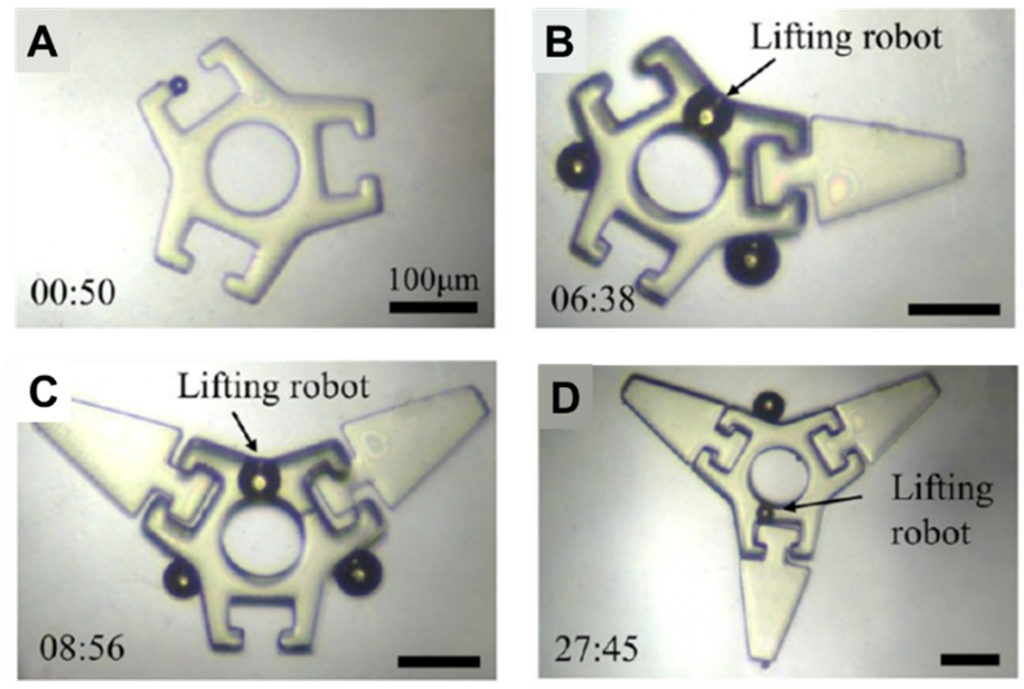
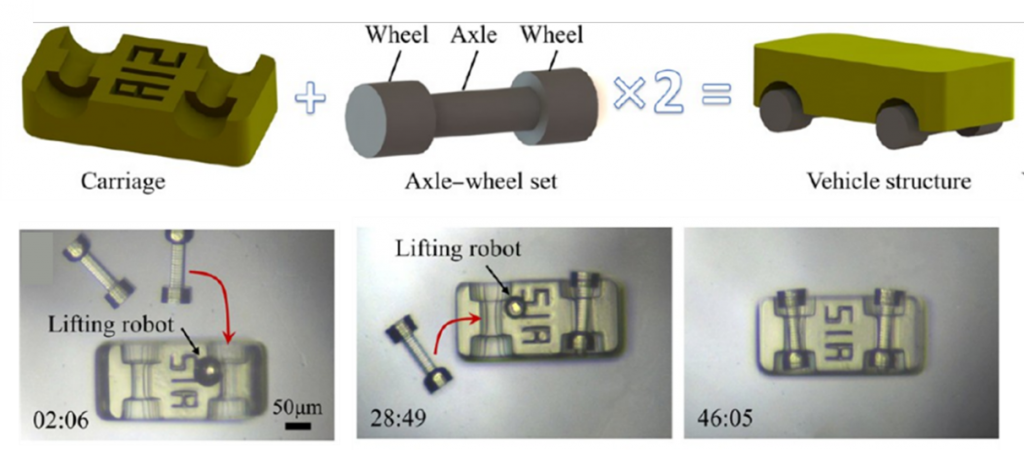
同じ手法で、もっと面白い小型ロボットも作ったので、以下の写真と動画をご覧ください。【PR】
BMF Japan 株式会社
〒103-0022
東京都中央区日本橋室町 4-4-3 喜助日本橋室町ビル 5F Nano Park
TEL:03-6265-1568
Email:info@bmfjapan.jp
Website:https://bmfjapan.jp/

